Inverse Reinforcement Learning
WheeledLab (Robot Learning Framework for 4-wheeled Drive Robots)
Terrain-Adaptive Locomotion Controller
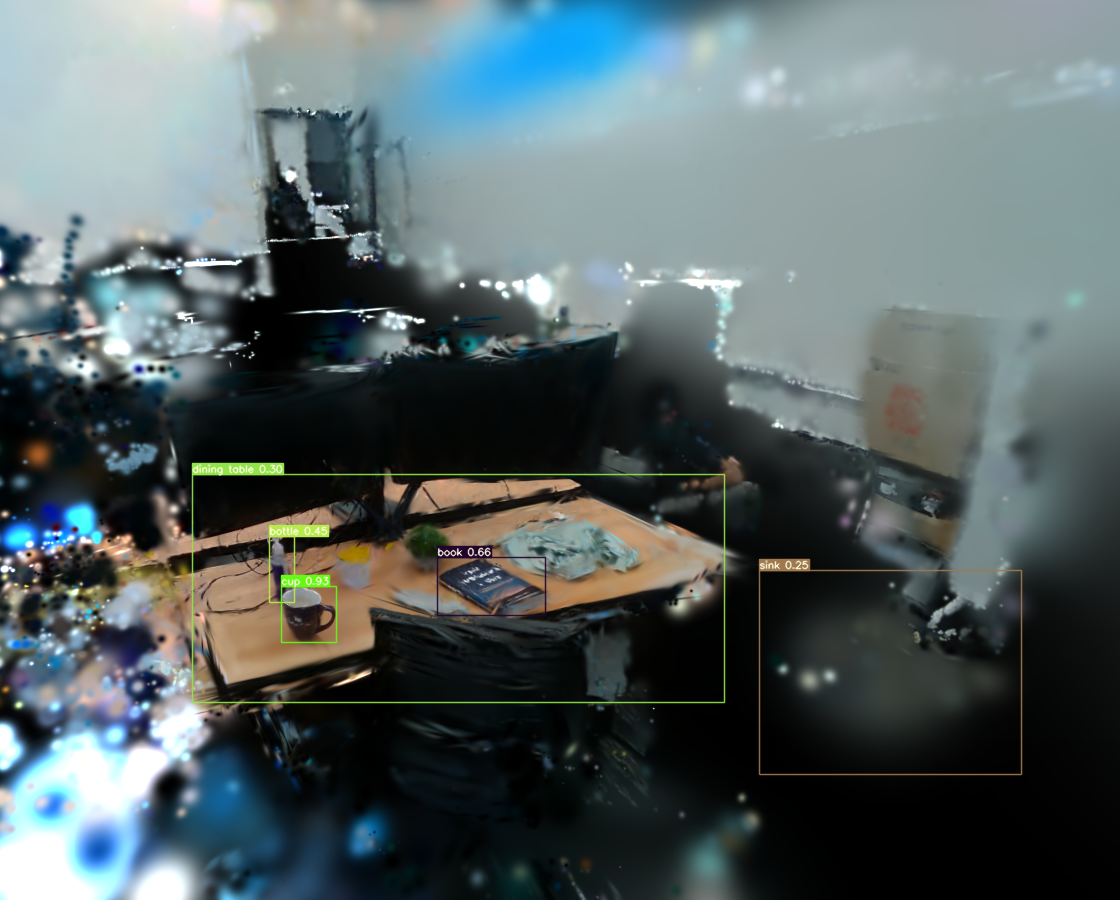
Semantic Segmentation using gaussian Splatting SLAM
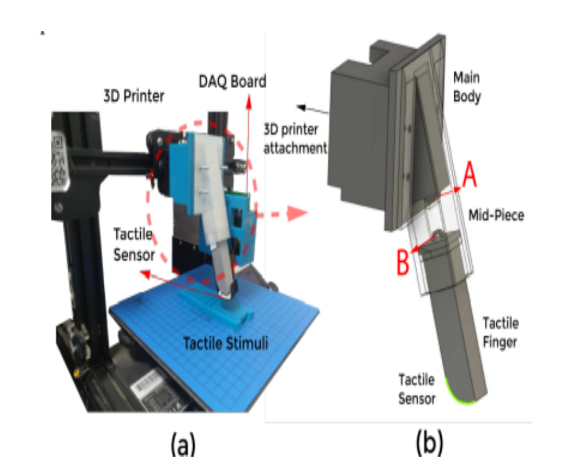
Fault Tolerance of Tactile Sensor Using Genetic Algorithm
Built self-drive capability (Skateboard) Chassis
Inventory Dispensing System
Autonomous F1/10th RaceCar
Gait Trajectory Execution for an Existing Exoskeleton
Flipkart Grid Challenge
Controlling two robots through a common Master