Self-Driving Levle 4 Autonomous Skateboard
Project information
- Developed a Level 4 self-driving skateboard chassis using a drive-by-wire system, incorporating drive, battery pack, and adaptability for various body types.
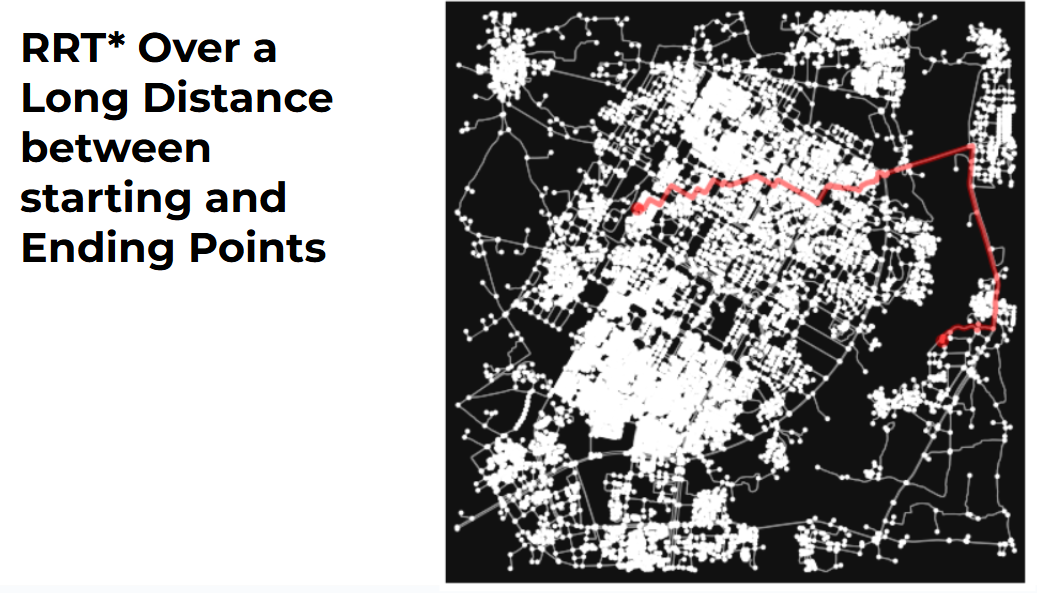
- Designed a path planning stack featuring RRT* for efficient global path planning, optimized for dense obstacle fields and long distances.
- Integrated TEB Local Planner for adaptive local trajectory planning, capable of switching to optimal paths among candidate sets and handling multiple topologies.
- Enhanced navigation with parallel planning and custom trajectory optimization to avoid obstacles and via-point tracking, addressing challenges in narrow corridors and minimizing local minima issues.
- Project Slides: Link