Fault Tolernce of Tacticle Sensor Using Genetic Algorithm
Project information
- Developed a fault-tolerance approach for tactile sensors in robotic systems using a genetic algorithm to detect and compensate for faulty taxels within a matrix of sensing elements.
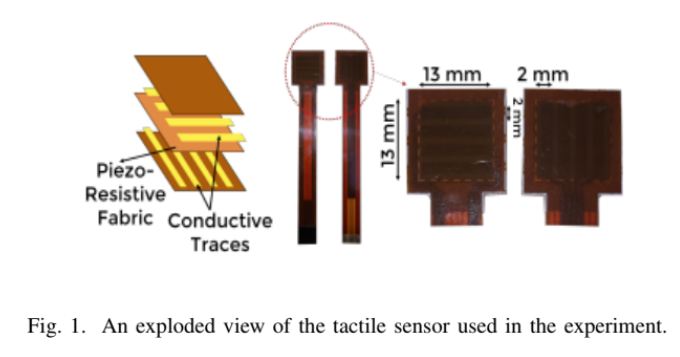
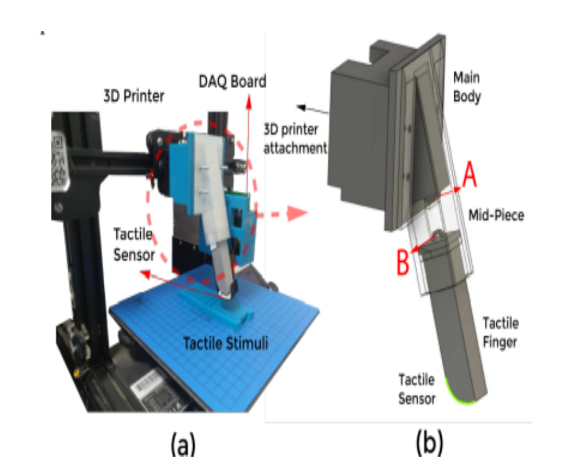
- Designed a piezoresistive tactile sensor in a 4x4 grid, attached to a robotic finger, and tested with graded textures to simulate human touch sensations.
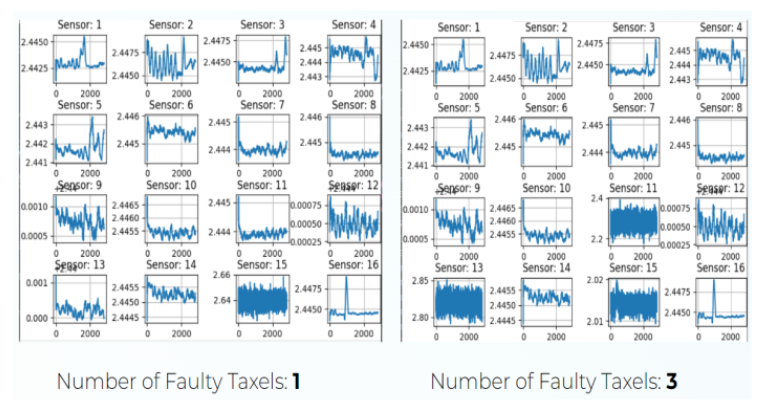
- Injected faults (e.g., drift, hysteresis) using Gaussian noise and developed a sensor fault detection method leveraging correlation estimation and statistical measures.
- Implemented a genetic algorithm with custom fitness functions using Discrete Fourier Transform parameters to correct faulty readings, with crossover and mutation for adaptive fault compensation.
- Project Report: Link