Autonomous F1Tenth RaceCar

Project information
- A perception and control framework for high speed Autonomous Driving.
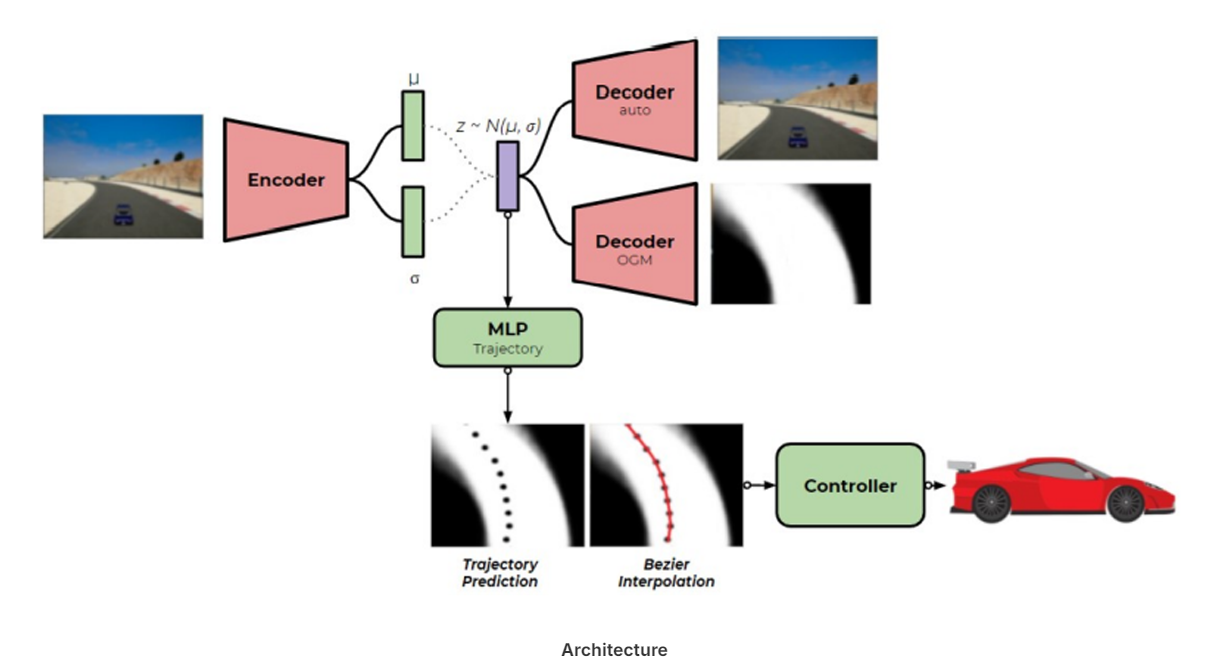
- Built an end-to-end pipeline prioritizing fast inference, robust perception, and control. The system learns a latent representation of the environment from road images, which directly regresses to Bezier control points for efficient path planning.
- Ideal race lines are optimized through a speciation-based genetic evolution strategy, balancing speed and feasibility. The hardware includes an NVIDIA Jetson Nano and 3D cameras, while the car’s suspension system was modeled with stress analysis in Fusion 360. State estimation integrates data from encoders, IMUs, gyros, and depth cameras for reliable planning.
- GitHub: Link