Project information
- Designed Wheeled Lab, Wheeleed Lab is a unified and modular framework for robot learning for 4-wheeled Drive Robots that aims to simplify common workflows in robotics research (such as RL, learning from demonstrations, and motion planning). It is buit upon NVIDIA Isaac Lab to leverage the latest simulation capabilities and photo-realistic scenes and fast and accurate simulation.
- Salient Features:
- Extension for Sensor Configs integrated to the vehicle (includes HeightScanner, Camera, Lidar, and Contact Force sensor).
- Built the AckerMann Action Term for AckerMann drive vehicles.
- Actuator Config setup for low-level torque control.
- Different scenes to support training and testing of different algorithms.
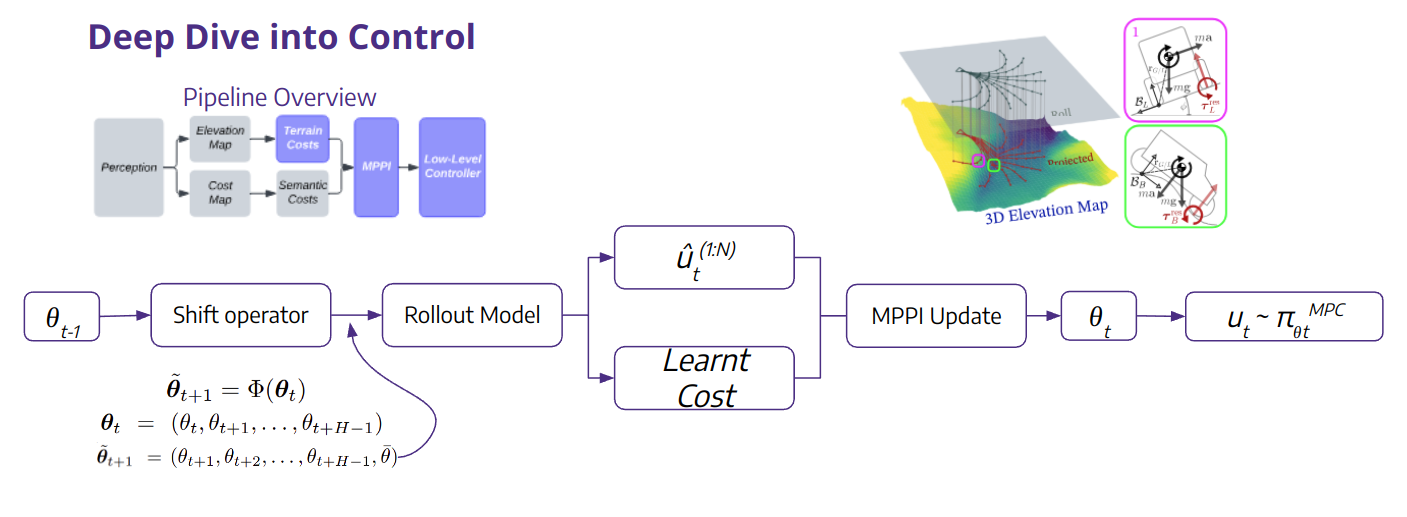
- This is part of development for a bigger project where we try to Learn cost function for crossing a ditch through Inverse Reinforcement Learning. Developing a learning-based controller to handle terrain misrepresentations in perceptual output, limiting policy scope to critical traversal scenarios (e.g., ditches). Leveraging expert human-driven data to optimize traversal performance, minimizing hand-tuning of cost functions.
.gif)