Object Detection using Gaussian Splatting SLAM for Household Setting Navigation

Project information
- Created a Gaussian-based SLAM framework that integrates object detection for enhanced localization and mapping in dynamic environments.
- Applied Gaussian state estimation for real-time object tracking, enabling precise position and movement predictions over sequential frames.
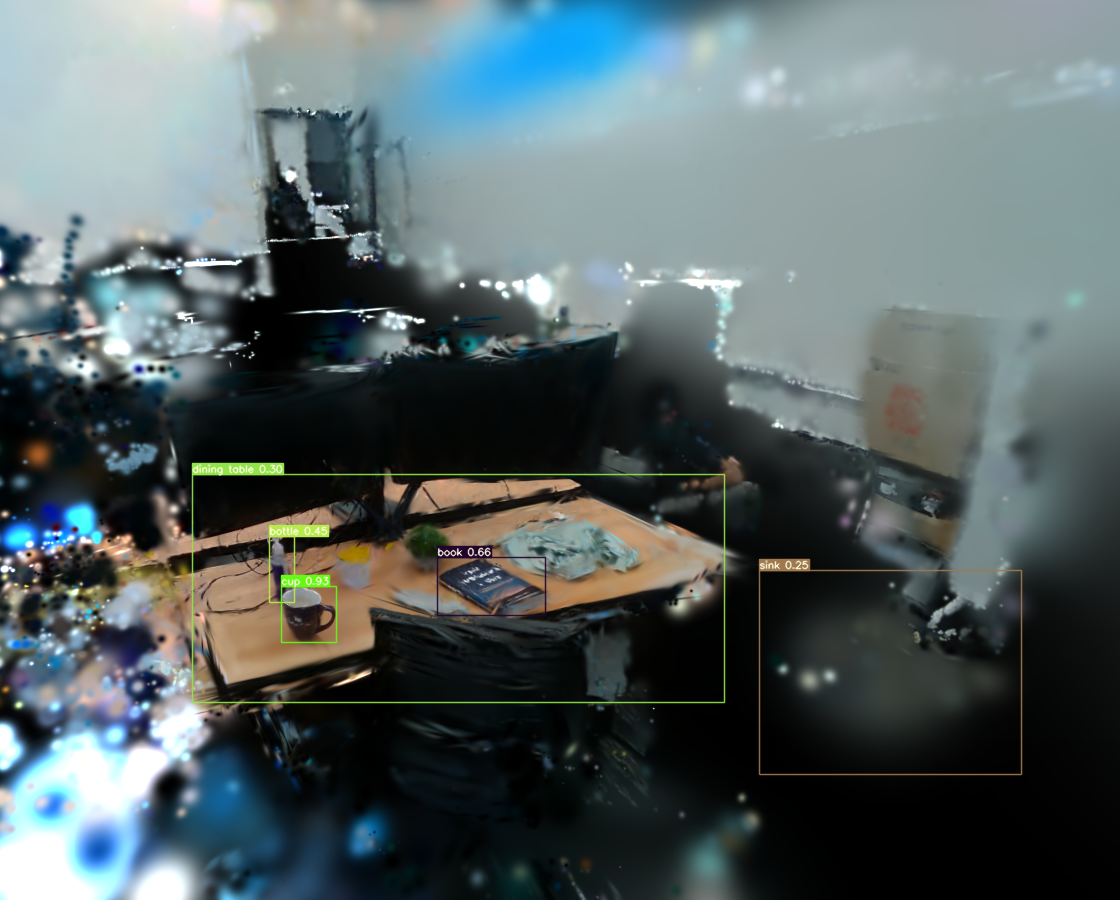
- Integrated YOLOv7 for object detection, extracting bounding box information from Gaussian-splatted images, and rendered 3D bounding boxes on point clouds using depth data for enhanced spatial visualization.
- Project Report: Link